
















EC機器人節拍優化
1.簡介
客戶現場正式生產的時候,客戶會計算當前機械臂工作一個流程的時間,計算出它的 UPH
(單位小時產能,指每小時的產量)如果 UPH 達不到會要求機械臂減少運行 ct 提高機械臂工作效率。
2.操作流程
(1):減去多余的動作,盡可能讓機器人動作簡潔,可以減少對應機器人到位減速和加速的時間。
(2):提高機械手運動指令的速度,加速度,整體運行倍率 建議最大速度:
如下圖,分別是MOVL和MOVJ的速度和加速度,其他運動方式也是一樣
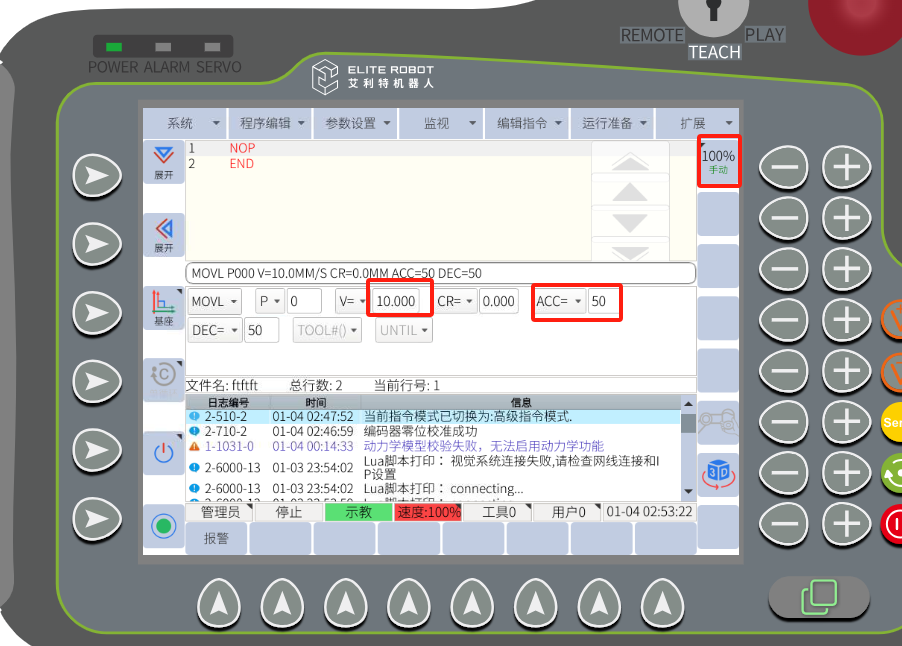

對于線性移動有多種工具速度可以選擇
V= 直線速度,范圍 1~3000MM/S;
VR= 旋轉角速度:1~3 00?/S;
AV= 為絕對直線速度:1~3000MM/S;
機器人運行速度計算是工具速度×運行倍率的才是真實速度
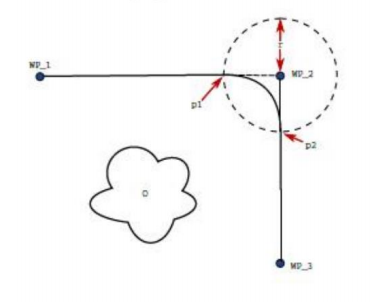
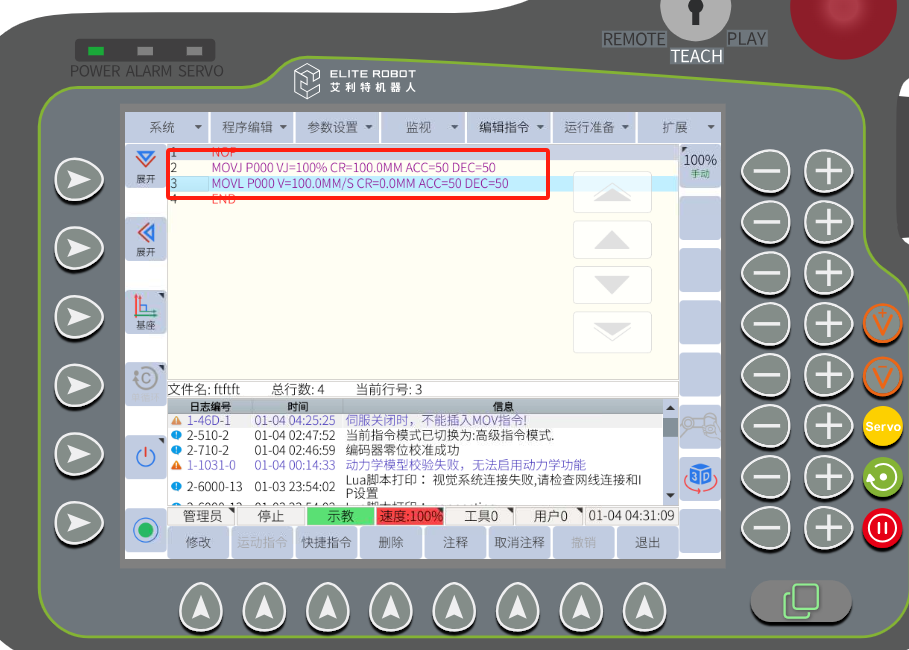
(3):在一些不需要精確到達的位置(過度點)可以在當前位置(根據現場實際情況做出細微調整)
提示:交融參數,工作點(需要精確到達的點位)不能有值/不能加等待時間(此點必須運動
流暢連續)等。
PL,軌跡交融等級,數值范圍 0~7。數值越大,軌跡融合程度越高。未選時默認為 PL=0。
CR,交融半徑,單位:mm。不推薦使用參數 PL

如下圖案例:
(4):減少程序一些沒必要的等待時間(與相機拍照/PLC/氣缸/夾爪等外部設備信號交互時)
比如:吸真空只需要0.5S就可以吸取產品程序內設置1S 可以更改為0.5S
(5):姿態變化較大(RX,RY,RZ)的位置,優先選用關節運動。需要走直線(X,Y,Z)的推薦直線運動
3.常見問題解答
(1)問:速度和加速度能不能在所有的移動指令中設到最大?
答:不可以,如果是短距離運行的話,速度和加速度過大會導致抖動和加大碰撞風險,需要在不同的位置區域采取不同的速度和加速度,通過不斷測試,才選擇合適的速度和加速度。
(2)問:機器人速度已經感覺合適了,還能從其他地方進一步縮減CT嗎?
答:可以,如以下作業環境可以從多個方面入手考慮
1.真空吸附:靠近產品時,提前打開真空,縮短真空反應時間,到位時只需檢測真空信號就可以。
2.碼垛搬運:安全位設置在碼垛區域正上方,每一次碼垛前和碼垛后保持在同一位置;
提前執行末端工具部分動作,到產品拾取點時,只需執行抓取動作檢測工具是否滿足拾取條件。
3.傳送帶取放:每次往傳送帶上放產品時,放完之后,及時去抓取另外一個產品,當傳送帶的產品流走時,就能以最短的時間內放下第二個產品。


























