
















CS機(jī)器人常用參數(shù)配置
1. 簡介
在CS機(jī)器人中有很多常用參數(shù)需要我們?nèi)ミM(jìn)行配置,比如安裝方式,IP地址的設(shè)置,新建TCP,負(fù)載的設(shè)定,全局變量的設(shè)置,坐標(biāo)系的建立,原點(diǎn)的設(shè)定,啟動(dòng)的設(shè)定,如何回打包位等等一些常用參數(shù)的配置。
2. 操作流程
2.1CS機(jī)器人的安裝方式
CS機(jī)器人有正裝,側(cè)裝,倒裝三種安裝方式,如圖-1是正裝,圖-2是側(cè)裝,圖-3是倒裝,在這三種安裝方式下都可以自定義設(shè)置機(jī)器人繞Z軸旋轉(zhuǎn)的角度以及傾斜的角度,用戶可以根據(jù)實(shí)際情況選擇安裝方式以及定義機(jī)器人繞Z軸旋轉(zhuǎn)的角度和傾斜的角度。用戶在安裝完實(shí)體機(jī)器人后要在示教器“配置”→“通用”→“安裝”中選擇實(shí)際機(jī)器人的安裝方式。

圖-1

圖-2

圖-3
2.2CS機(jī)器人負(fù)載以及重心的設(shè)置,按照?qǐng)D-5所示操作步驟操作
第一步:點(diǎn)擊“配置”,進(jìn)入機(jī)器人參數(shù)配置界面
第二步:點(diǎn)擊通用配置中的“負(fù)載”
第三步:添加一個(gè)新負(fù)載,如果只需要用到一個(gè)負(fù)載那么這一步可以省略
第四步:輸入實(shí)際安裝在機(jī)器人末端上工具的重量,這個(gè)重量不能相差太 多,如果你輸入的重量低于實(shí)際重量,那么你按下機(jī)器人自由拖 動(dòng)按鈕后機(jī)器人三軸就會(huì)往下掉,因?yàn)闄C(jī)器人會(huì)根據(jù)你輸入的重 量來輸出一個(gè)往上的力,你輸入的重量低于實(shí)際工具的重量所以 導(dǎo)致機(jī)器人輸出的力不夠;反之,如果你輸入的重量大于實(shí)際工 具的重量,那么機(jī)器人三軸就會(huì)往上抬。
第五步:設(shè)置重心,默認(rèn)重心是在機(jī)器人法蘭盤中心,但是實(shí)際工作中末 端安裝了工具那么重心位置肯定就發(fā)生了變化,那么我們就需要 根據(jù)實(shí)際情況在X,Y,Z三個(gè)方向進(jìn)行偏移去移動(dòng)重心的位置, X,Y,Z三個(gè)方向參考機(jī)器人法蘭坐標(biāo)系,在機(jī)器人“配置”→“負(fù)載 ”→”負(fù)載可視化“,如圖-4紅框所示即為機(jī)器人法蘭坐標(biāo)系。以 機(jī)器人末端R485通訊接口為參考,指向R485通訊接口的為Y的負(fù) 方向,以Y的負(fù)方向?yàn)閰⒖柬槙r(shí)針旋轉(zhuǎn)90度為X的負(fù)方向,以Y的 負(fù)方向?yàn)閰⒖寄鏁r(shí)針旋轉(zhuǎn)90度為X的正方向,以Y的負(fù)方向?yàn)閰⒖?順時(shí)針旋轉(zhuǎn)180度為Y的正方向,與機(jī)器人末端垂直且指向外的方 向?yàn)閆的正方向,與機(jī)器人末端垂直且指向里的方向?yàn)閆的負(fù)方向。

圖-4
第六步:當(dāng)機(jī)器人質(zhì)量和重心設(shè)置好后點(diǎn)擊“立即設(shè)置”按鈕即可,這樣機(jī) 器人的負(fù)載以及重心就設(shè)置好了。
第七步:按下示教器頂部自由拖動(dòng)按鈕,機(jī)器人末端三色燈亮藍(lán)燈且機(jī)器 人沒有動(dòng)或者有一點(diǎn)微動(dòng)那就說明負(fù)載以及重心就設(shè)置正確;如 果機(jī)器人往下掉或者往上抬那就說明質(zhì)量沒有設(shè)置正確,如果機(jī) 器人往X,Y,Z三個(gè)方向的某一個(gè)方向偏那就說明重心沒有設(shè)置正確。

2.3CS機(jī)器人IP的設(shè)置,如圖-6和圖-7所示步驟操作
第一步:點(diǎn)擊艾利特機(jī)器人圖標(biāo)
第二步:點(diǎn)擊設(shè)置,進(jìn)入到圖-7界面
第三步:點(diǎn)擊“網(wǎng)絡(luò)”
第四步:選擇“靜態(tài)地址”,使用FB1網(wǎng)口就設(shè)置FB1網(wǎng)絡(luò),使用FB2網(wǎng)口就 設(shè)置FB2網(wǎng)絡(luò)
第五步:設(shè)置IP地址以及子網(wǎng)掩碼,機(jī)器人的IP地址要與需要連接的外部 設(shè)備在同一個(gè)網(wǎng)段,也就是前三段數(shù)字要一樣;子網(wǎng)掩碼為 “255.255.255.0”
第六步:點(diǎn)擊“應(yīng)用”即可

圖-6

圖-7
2.4CS機(jī)器人機(jī)械零點(diǎn)確定
2.4.1將機(jī)器人移至機(jī)器人默認(rèn)零位,如圖-8操作步驟所示
第一步:點(diǎn)擊”配置"
第二步:點(diǎn)擊“原點(diǎn)”
第三步:點(diǎn)擊“零位”
第四步:點(diǎn)擊“移至此處”,就會(huì)出現(xiàn)圖-9界面
第五步:在圖-9界面中一直長按“自由移動(dòng)”按鈕,等待機(jī)器人回到零位,如果機(jī)器人 能正確的回到圖-10姿態(tài),說明機(jī)器人零位正確,反之說明機(jī)器人零位錯(cuò)誤; 如果機(jī)器人零位不對(duì)了就要按照2.4.3操作步驟對(duì)機(jī)器人進(jìn)行機(jī)器人標(biāo)定
圖-8

圖-9
圖-10
2.4.2使用機(jī)器人對(duì)齊功能確定機(jī)器人零位,如圖-11操作步驟所示
第一步:點(diǎn)擊“操作”
第二步:將坐標(biāo)系選擇“基座”
第三步:點(diǎn)擊“對(duì)齊”,就會(huì)出現(xiàn)圖-11界面
第四步:在圖-12界面中長按”自由移動(dòng)“按鈕,等待機(jī)器人末端與地面垂直即可;如果 機(jī)器人與地面垂直了即圖-13的姿態(tài)說明機(jī)器人零位沒有問題,反之說明機(jī)器 人零位不對(duì),如果機(jī)器人零位不對(duì)了就要按照2.4.3操作步驟對(duì)機(jī)器人進(jìn)行機(jī) 器人標(biāo)定
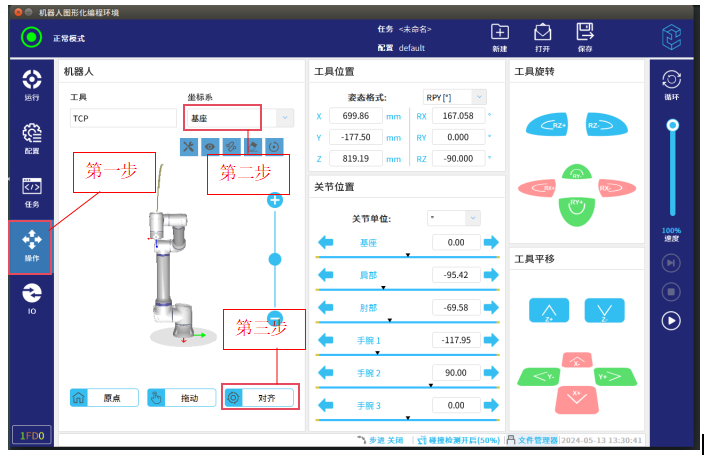
圖-11

圖-12
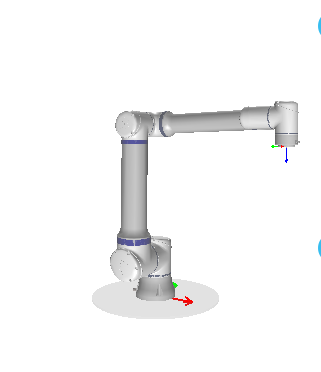
圖-13
2.4.3機(jī)器人零點(diǎn)的標(biāo)定
第一步:在機(jī)器人末端以及與機(jī)器人末端垂直的面上安裝一個(gè)末端是尖的圓柱體工 具,類似與牙簽一樣形狀的工具
第二步:進(jìn)入機(jī)器人專家模式,在圖-14紅框標(biāo)記處連續(xù)點(diǎn)擊5-8次,出現(xiàn)圖-15畫面, 然后輸入密碼”elibot"就可以進(jìn)入專家模式
圖-14
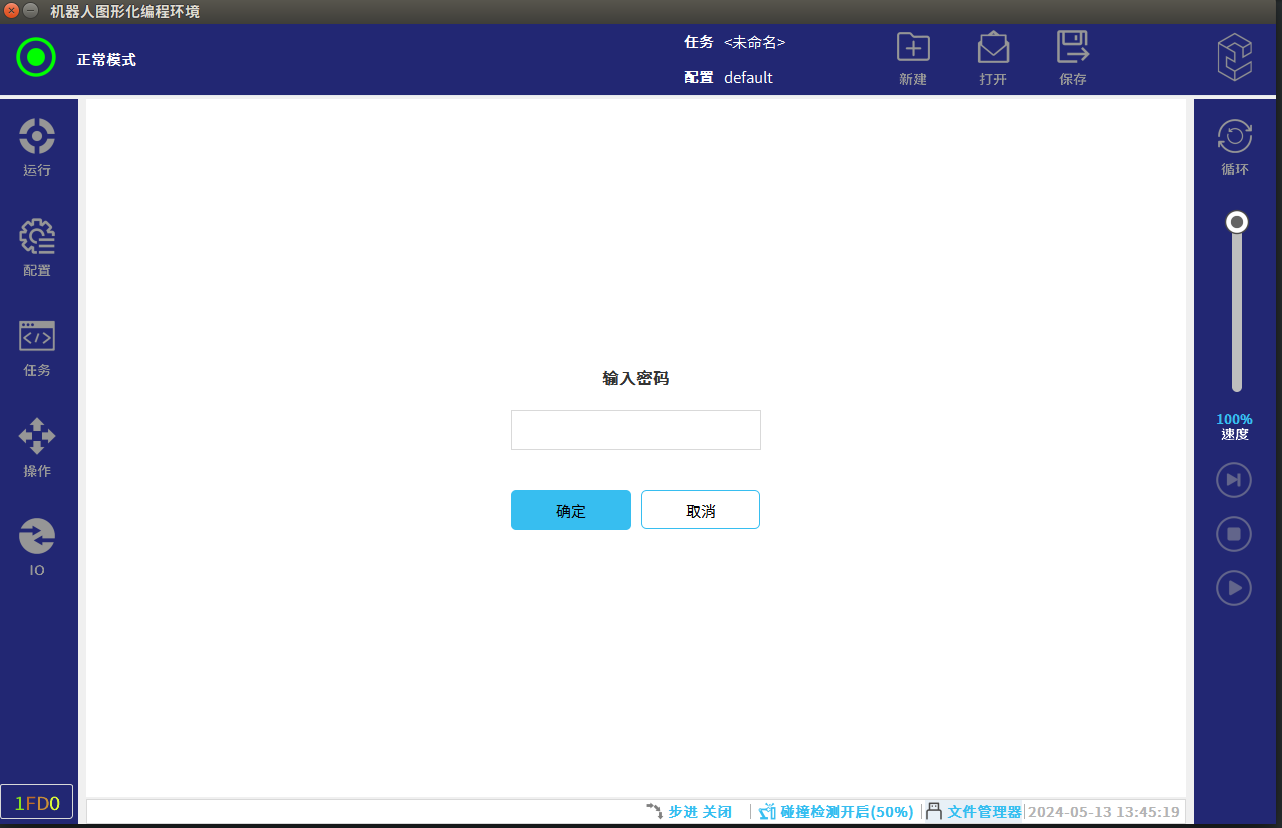
圖-15
第三步:進(jìn)入圖-16界面,按照?qǐng)D示步驟進(jìn)行標(biāo)定操作;機(jī)器人標(biāo)定零點(diǎn)時(shí)需要標(biāo)定20 個(gè)點(diǎn),就是要使機(jī)器人以20個(gè)不同的姿態(tài)用機(jī)器人末端安裝的工具尖點(diǎn)去對(duì) 安裝在與機(jī)器人末端垂直面的工具尖點(diǎn)
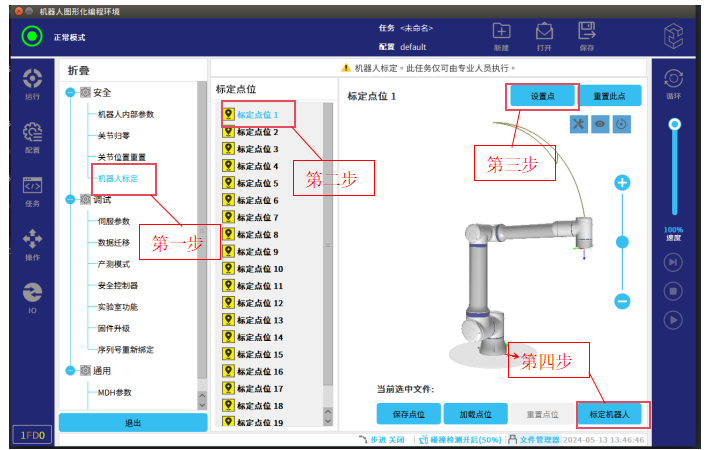
圖-16
第四步:將20個(gè)點(diǎn)位都設(shè)置好了之后,點(diǎn)擊“標(biāo)定機(jī)器人”即可,這樣機(jī)器人標(biāo)定就完 成了
2.5開機(jī)自動(dòng)加載任務(wù),按照?qǐng)D-17操作步驟所示
第一步:點(diǎn)擊“啟動(dòng)"
第二步:勾選”開機(jī)自動(dòng)加載任務(wù)文件“選項(xiàng)
第三步:選擇需要加載的文件
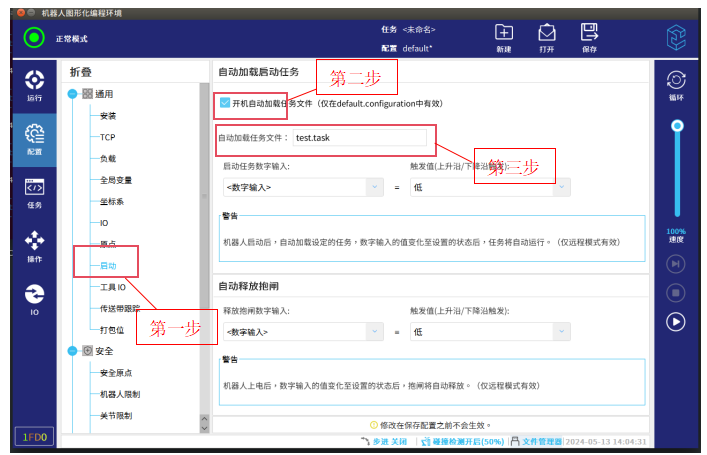
圖-17
3. 常見問題解答
3.1設(shè)置IP時(shí)在使用機(jī)器人FB2網(wǎng)口時(shí)可能會(huì)出現(xiàn)FB網(wǎng)口始終處于未連接狀態(tài),這時(shí)就需要重啟一下示教器。
3.2在標(biāo)定完機(jī)器人后發(fā)現(xiàn)機(jī)器人零位還是不對(duì),比如使用對(duì)齊功能機(jī)器人還是對(duì)不齊,出現(xiàn)這種現(xiàn)象有可能就是在進(jìn)行機(jī)器人標(biāo)定時(shí)誤差值有點(diǎn)大,需要重新進(jìn)行機(jī)器人標(biāo)定,在進(jìn)行機(jī)器人標(biāo)定時(shí)要機(jī)器人末端安裝的工具尖點(diǎn)去對(duì)安裝在與機(jī)器人末端垂直面的工具尖點(diǎn)


























