
















CS機器人在產測模式下回到打包位操作方法
1. 簡介
機器人在使用過程中,可能會出現撞機或者其他原因引起的軸伺服損壞導致機器人無法正常上電,這個時候機器人就無法回到打包位打包,這篇文檔主要介紹如何在這種情況下將機器人回到打包位進行打包。
2. 操作流程
2.1在產測模式下將機器人移至打包位姿態(以肘關節伺服損壞為例)
第一步:在圖-1紅框標記處點擊5-8次就會出現請輸入密碼界面,輸入密碼:elibot后 就會進入圖-2界面。

圖-1
第二步:在專家模式下,選擇產測模式,啟用產測模式,勾選屏蔽伺服報警。如圖-2紅框標記所示。
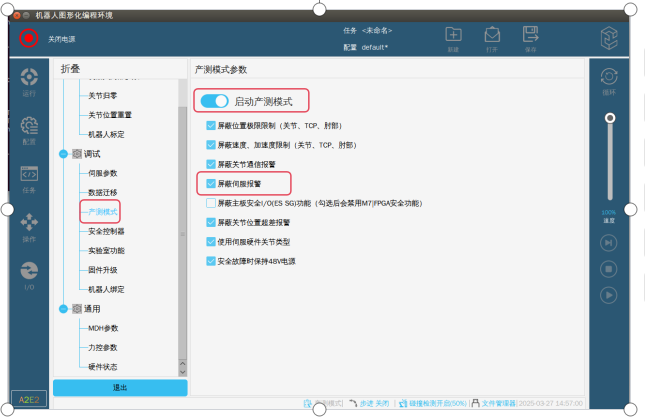
圖-2
第三步:退出專家模式,這個時候因為伺服報警已經屏蔽了,所以機器人可以正常上電了。如圖-3所示在配置界面→選擇打包位→點擊移至默認打包位就可以進入圖-4界面。

圖-3
第四步:一直按著自由移動按鈕,如圖-4紅框所示,機器人無故障的軸就會回到打包姿態,有故障的軸不會運動。(需要注意的是因為機器人其中一個軸或多個軸有故障時,有故障的軸是不會運動的,所以在移至打包位時將機器人放在空間比較開闊的地方操作且運行速度要慢,防止機器人在運動過程中碰撞到其他障礙物或者機器人關節相互碰撞)以機器人肘關節有故障為例,機器人運行到打包位時肘關節是不會運動的,如圖-5所示姿態就是肘關節在-90度時運到到打包位的姿態,圖-6就是機器人正確的打包位姿態。通過圖5與圖6對比可以發 現,機器人肘關節也就是三軸需要逆時針旋轉270度才能回到正常打包位。

圖-4
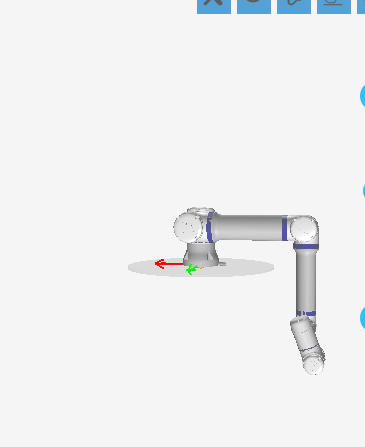
圖-5
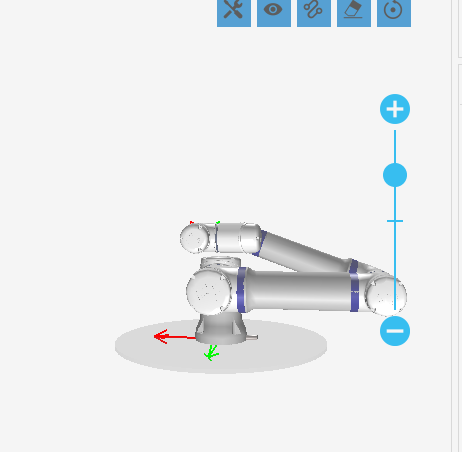
圖-6
第五步:在機器人無故障的軸都回到打包位之后,按照第一步和第二步的操作將”屏蔽伺服報警“勾選去掉,然后把產測模式關掉,將機器人控制柜斷電,然后通過抱閘釋放工具手動將機器人肘關節逆時針旋轉270度回到打包位。下方鏈接是抱閘工具使用手冊。
TS20241201KA-CS抱閘盒用法-CS技術文檔.pdf
3. 常見問題解答
1.使用抱閘工具時最好是兩個人一起操作,一個人負責操作抱閘工具,一個人負責抬著有故障的關節,防止關節因剎車釋放從而掉落。


























