
















EC機器人新機快速使用
1. 簡介
本章重點介紹機器人使用的快速入門,它不是一個全面的使用指南,有關設置和編程的更多信息,請參閱相關手冊。
2. 操作流程
2.1 機器人系統介紹
1. 機器人系統主要由機器人本體(以下簡稱為:本體),機器人控制柜(以下簡稱為:控制柜)和機器人示教器(以下簡稱為:示教器)組成。
2. 本體主要由關節和連桿組件構成,用戶可以使用示教器來控制關節的移動。
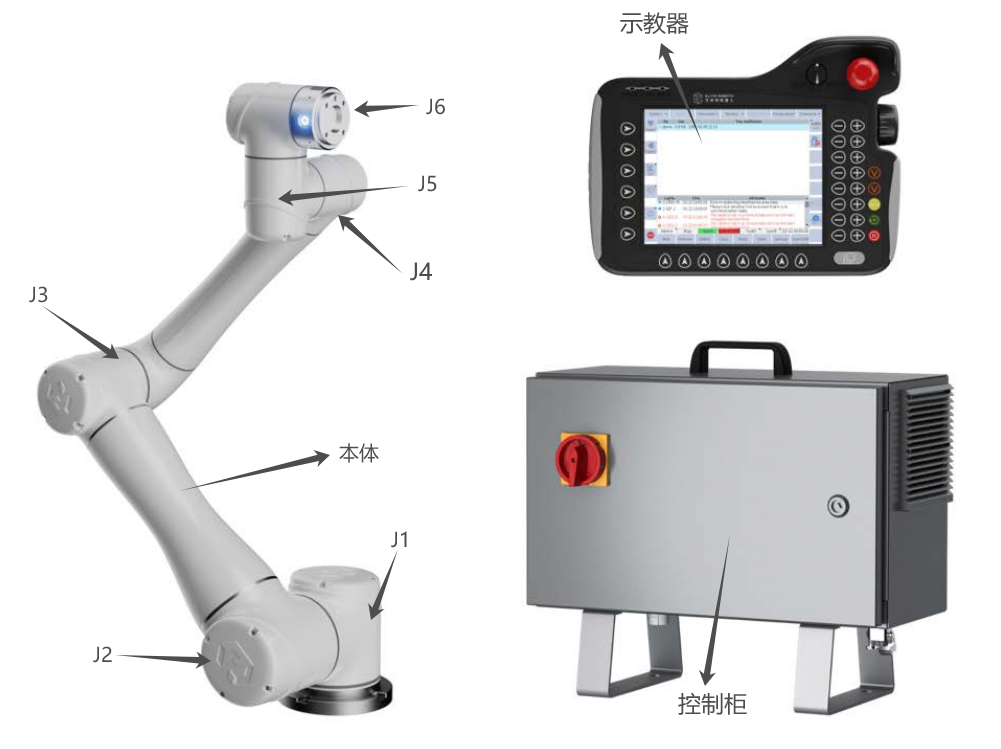
3. 控制柜為機器人系統的控制部分,可控制機器人在工作空間中的運動位置、速度、加速度、姿態和軌跡,以及連接設備的電氣輸入輸出端。
4. 示教器是機器人系統中的顯示和操作部分,用戶可通過示教器操作機器人本體并對機器人進行編程。
2.2 硬件安裝及開機
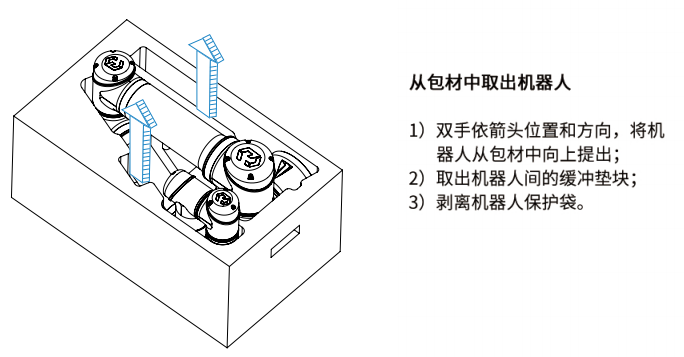
1. 裝箱清單。
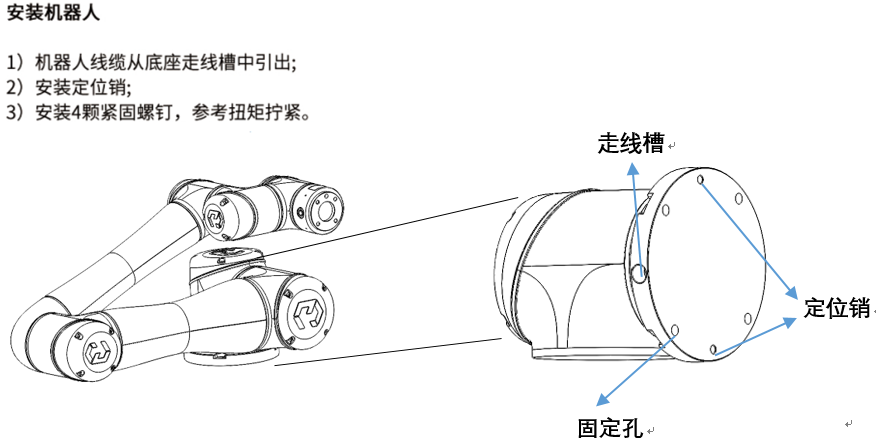
2. 安裝機器人本體。
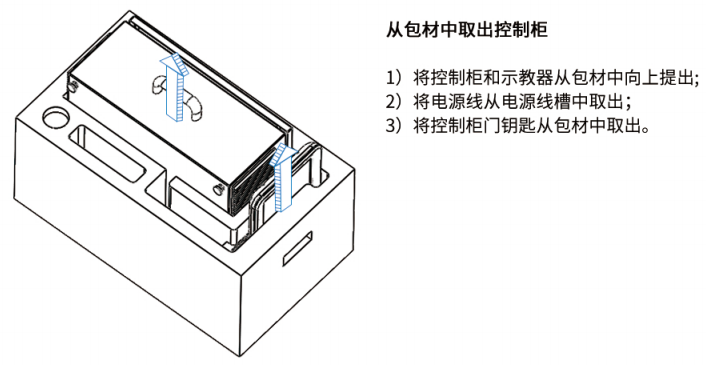
3. 安裝機器人控制柜、示教器和連接線纜。
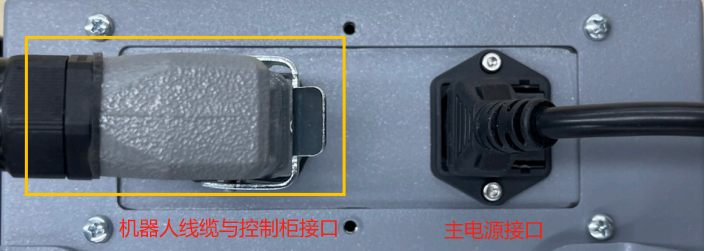
4. 控制箱的主電源線末端插入控制箱電源端口,并將另一端插入AC220V插座;機器人線纜末端有一個重載方形插頭,將重載方形插頭插入控制箱。注意插入方向,插緊后要鎖上連接器。
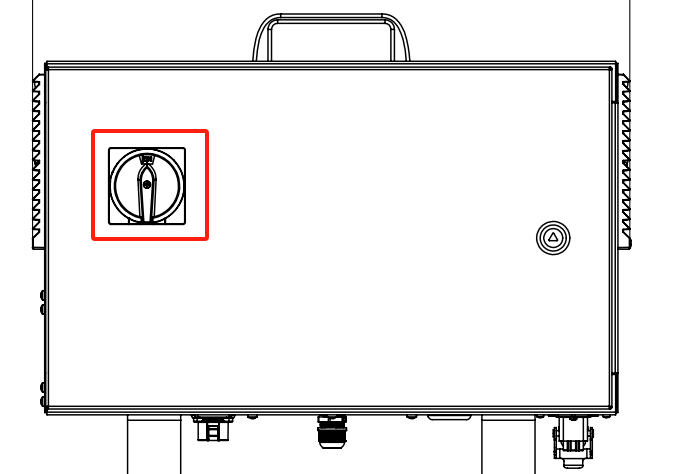
5. 線束連接完成后旋轉電控柜上的開機按鈕置ON。
2.3 機器人初始化
功能:清除報警初始化并同步、編碼器校驗,使機器人能正常準確運行。
步驟:1. 開機后,點擊示教器屏幕左下角紅色按鈕以清除報警初始化。
2. 變黃后,打開伺服再次點擊該按鈕進行編碼器校驗,直到按鈕變綠。 備注:舊版本中報警與同步按鈕未合并,需點擊左下角紅色按鈕清除報警、然后點擊上方的 同步按鈕進行同步。
2.4 機器人運行前準備
● 安裝參數確認
功能:確認必要的參數,以免發生意外情況。
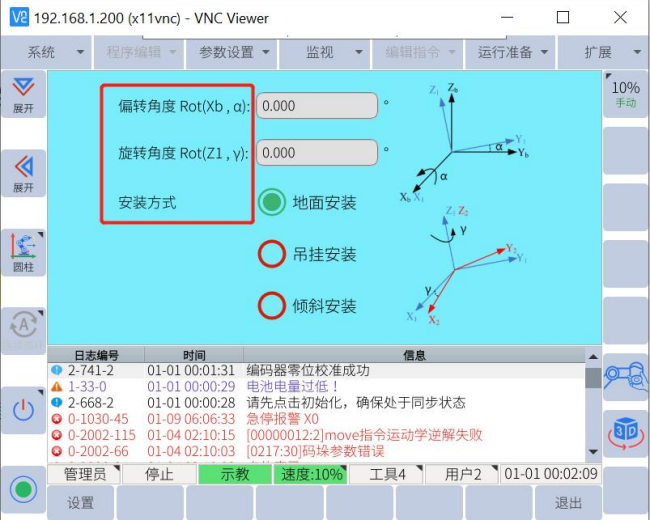
步驟: 點擊“運行準備”>“安裝設置”,選擇安裝方式,若機器人實際為水平安裝,則如圖選擇 地面安裝,角度俱為 0。若為其他安裝方式,如側裝倒裝,可參考: 相關文檔進行設置https://bbs.elibot.cn/forum/detail/topic/142.html
● 工具負載設置
功能:由于每個工具重心質量不同,需要設置合理的負載數值,使機器人能正常工作
步驟: 在機器人末端安裝工具后,打開“運行準備”>“工具負載設置”,選擇工具號 (可選 0>7),填寫下圖圈出的部分 x, y, z(未安裝末端治具時可不用設置)。
2.4 手動移動
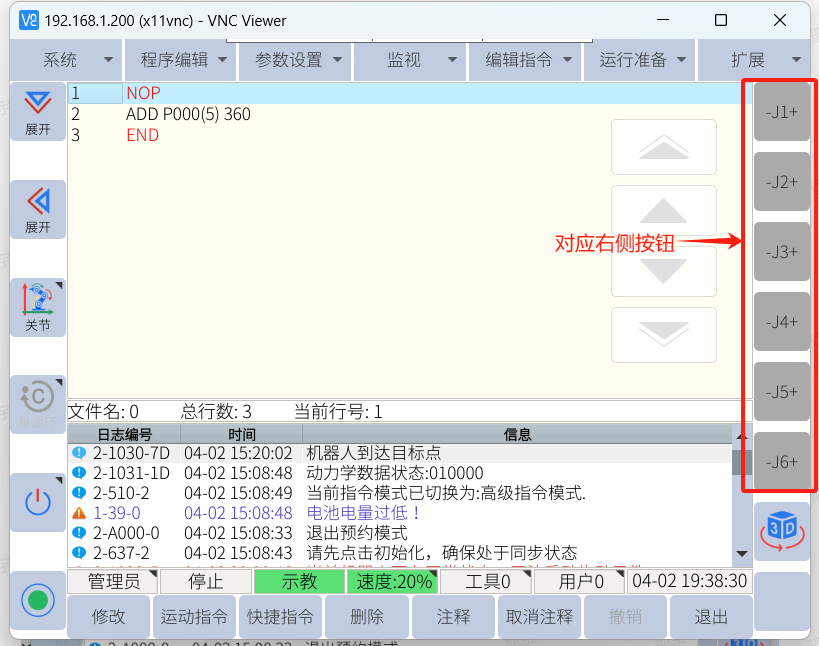
機器人系統啟動后,機器人可以通過多種方式移動。以下為如何使用示教器控制單關節軸運動:
1. 點擊示教器屏幕左側菜單欄中的坐標并選中關節按鈕
2. 遠離機器人
3. 按住示教器背面的三位使能開關,伺服指示燈亮
4. 按下所需軸運動按鈕的 +/- 按鈕
用戶還可以使用拖動功能移動機器人,要激活機器人的拖動示教功能,請找到位于工具法蘭一側的藍色按鈕。

用戶須按住藍色按鈕,同時將機器人拖動到所需位置,松開拖動示教啟用按鈕,即可退出拖動示教模式。
2.5 機器人程序
2.5.1 新建程序
創建一個程序,點擊“新建”,會彈出一個界面,如圖 4-5 所示。

點擊“文件”后,輸入需要的文件名(英文或數字),點擊“確定”即可創建一個新的程序文件
2.5.2 插入指令
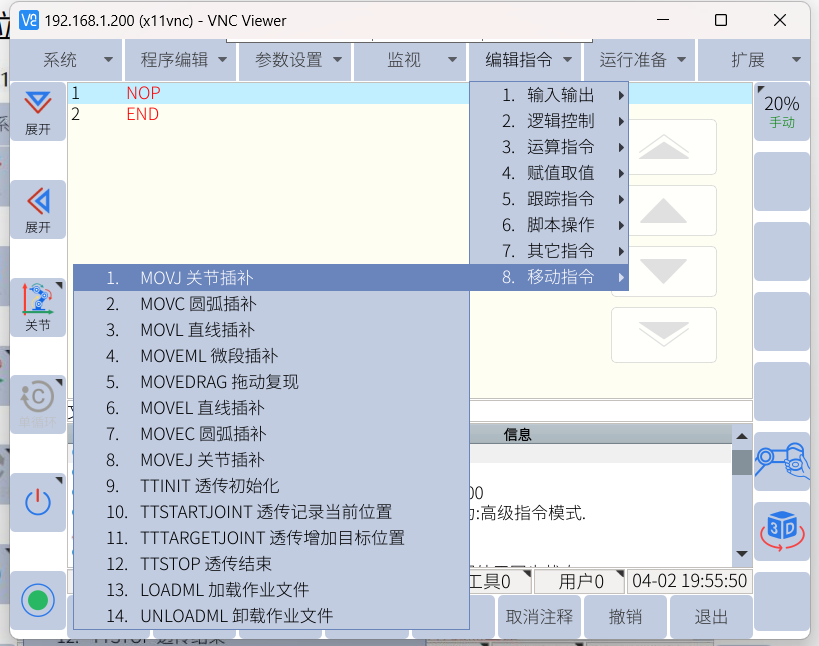
要插入指令,請找到主菜單欄并單擊“編輯指令”選項卡。以下指令類別可用:
1. 輸入輸出
2. 邏輯控制
3. 運算指令
4. 賦值取值
5. 碼垛指令
6. 腳本操作
7. 其它指令
8. 移動指令
除移動指令外,所有指令的插入方法均相同。
1. 在程序編輯頁面,將光標移動到要插入指令位置的前一行。
2. 然后按主菜單下的“編輯指令”或子菜單區域的“快捷指令”選擇要插入的指令,如 圖4-6 所示。
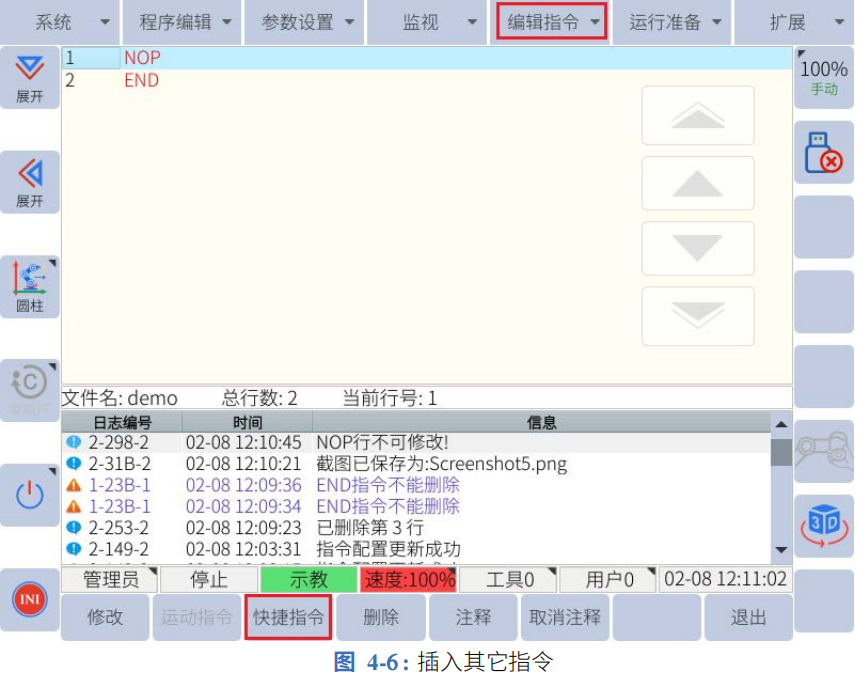
3. 編輯完參數后,按“確定”插入指令。子菜單區域的“快捷指令”選項卡僅包含部分指令,但通過按主菜單欄中的“編輯指令” 可以找到所有指令。
2.5.3 插入移動指令
在不使用 P /V變量的情況下插入移動指令時,機器人的當前位置將被記錄到移動指令中。請務必按下三位使能開關,機器人上使能后才能成功插入移動指令。
插入移動命令的詳細步驟如下:
1. 使用拖動示教或單關節軸運動按鈕將機器人移動到所需位置;
2. 將程序光標移動到要插入移動指令的位置之前的行;
3. 按住三位使能開關 - “SERVO”指示燈將亮起;
4. 單擊子菜單欄中的“運動指令”或選擇 編輯指令 -> 移動指令,然后在下拉菜單中 選擇所需的移動方法;
5. 選擇移動指令后,編輯參數,按“確認”插入。
2.5 運行程序
切換到自動(PLAY)模式,選擇循環模式,按下伺服按鈕之后,點擊啟動:
1. 單步:每按一次運行按鈕僅執行一行指令,不執行非運動指令。
2. 單循環:執行一次程序。
3. 連續循環: 連續重復一個程序。

2.6 關機
當用戶準備關閉系統電源時,首先將示教器上的模式開關從 PLAY 或 REMOTE 轉到 TEACH 以結束當前程序。


3. 常見問題解答
1. 插入移動指令時必須按住三位開關。否則,移動指令將不會被插入。
2. 程序在編輯時自動保存。
3. 如果沒有保存工具信息或設置了錯誤的負載,機器人重力補償將無法正常工作。
4. 如果沒有使用正確的安裝方式,拖動示教功能將無法正常工作,機器人可能會向無法預測的方向運動。


























